By Ines Aviles-Spadoni, M.S., UFTI
Dr. Yu Wang of the Department of Mechanical and Aerospace Engineering at the University of Florida is building an autonomous vehicle (AV) facility that allows researchers to conduct interdisciplinary experiments.
The Smart Autonomy Lab’s primary purpose is to supply researchers with cutting-edge hardware and software for AV experimentation. Using their available resources, researchers can test and optimize algorithms in a cost-effective and controlled environment to improve AVs’ performance under various scenarios.
“Physical models are a great alternative to computer simulation in a real-world environment,” said Dr. Yu Wang, an assistant professor in the Mechanical and Aerospace Engineering Department at the University of Florida. “These models also capture the real-world uncertainties that computer simulation can’t show, including a safe testing environment that may not be available in a real-world testing site.”
Dr. Wang is the Smart Autonomy Lab’s director, and he is also the UFTI’s Autonomous and Connected Vehicle group lead. So, what does this lab offer in its arsenal? It offers an F1Tenth AV, a dynamic environment for testing, and motion capture cameras that tell the vehicles where they are like what GPS/GNSS does outdoor.
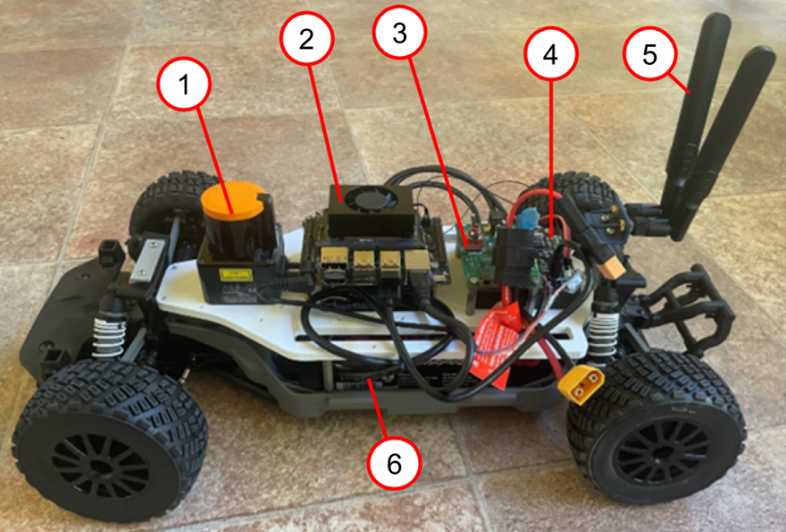
The F1Tenth AV is designed to test high-speed control algorithms. This vehicle can be calibrated to navigate various environments with utmost precision. It is equipped with a lidar that helps the car “see” up to 10 meters away and in all directions, allowing it to gauge its environment in real time. The vehicle’s onboard computing units are powerful, too. An Nvidia Jetson Xavier NX computer communicates with a master computer in the lab, along with the vehicle’s onboard sensor and the motor controller to drive the car. Other components include antennas, a battery, a motor controller, and ports that fit a variety of sensors for any experiment.
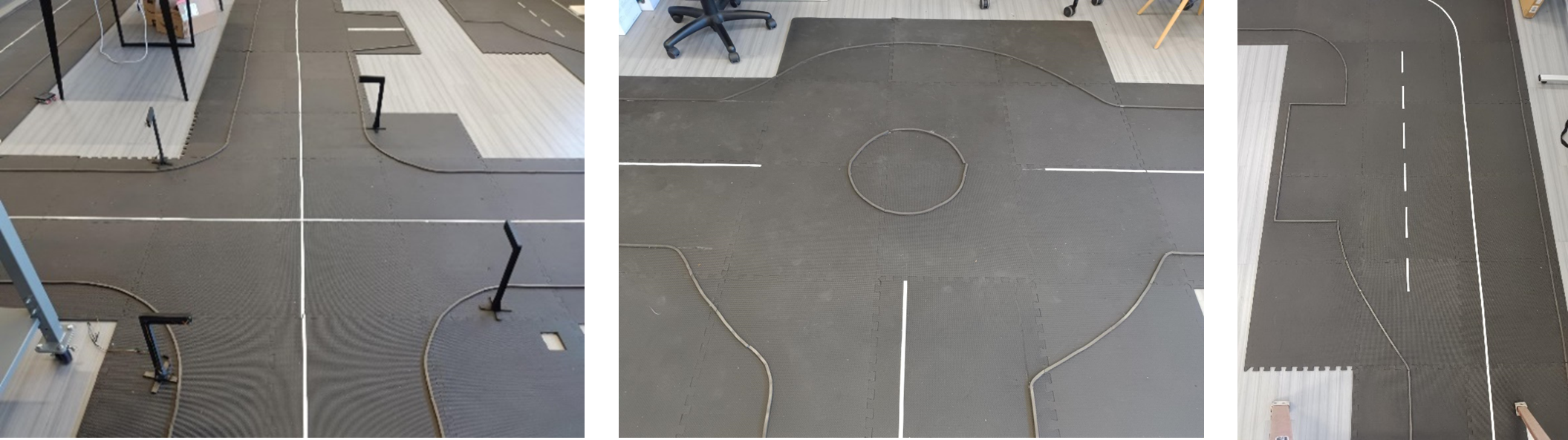
The Smart Autonomy Lab’s testing environment includes a 36 x 30 square foot space thoughtfully built to replicate streets in a real-world environment. The “streets” include curb heights, traffic intersections, adjustable traffic light timings, roundabouts, and merge lanes.
“Every feature in this testing space has been meticulously designed to challenge the F1Tenth’s capabilities,” Dr. Wang said.
The testing area is constructed from foam tiles that lock in place and can be disassembled and modified so that researchers can tailor the space to their needs.
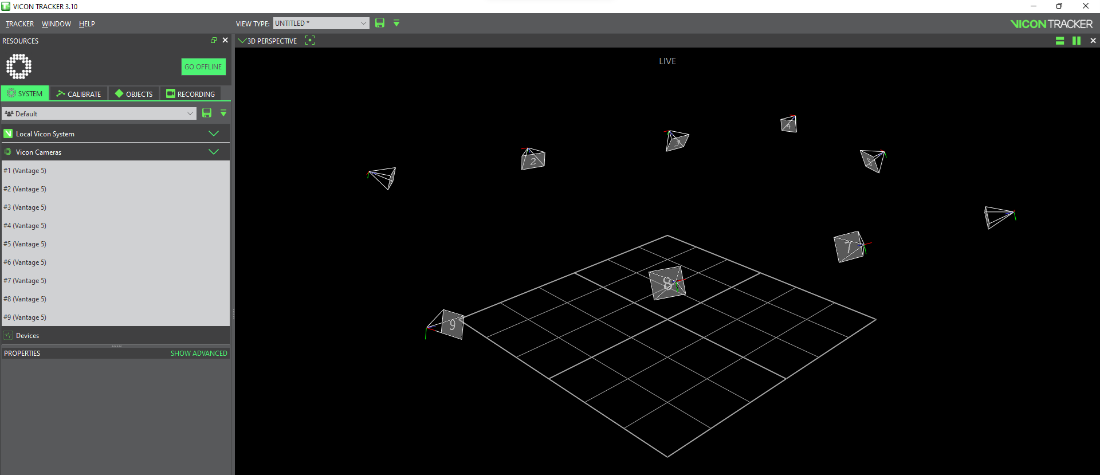
Because the F1Tenth AV has onboard units, the Smart Autonomy Lab has installed 10 Vicon Vintage 5 cameras and their respective software. The cameras communicate data messages about speed, location, and heading – the space between multiple vehicles. The software collects data that is then processed, analyzed, and then used to perfect the algorithm being tested or to improve the vehicle’s performance.
Dr. Wang’s Smart Autonomy Lab is genuinely a novel space that provides AV researchers with the resources and tools for testing AV technology. From the cool F1Tenth test vehicle to the creative indoor space, students and researchers from transportation engineering, computer science, mechanical engineering, and more will be able to work together to engineer advances in the AV space.
Below are additional images of the lab.