
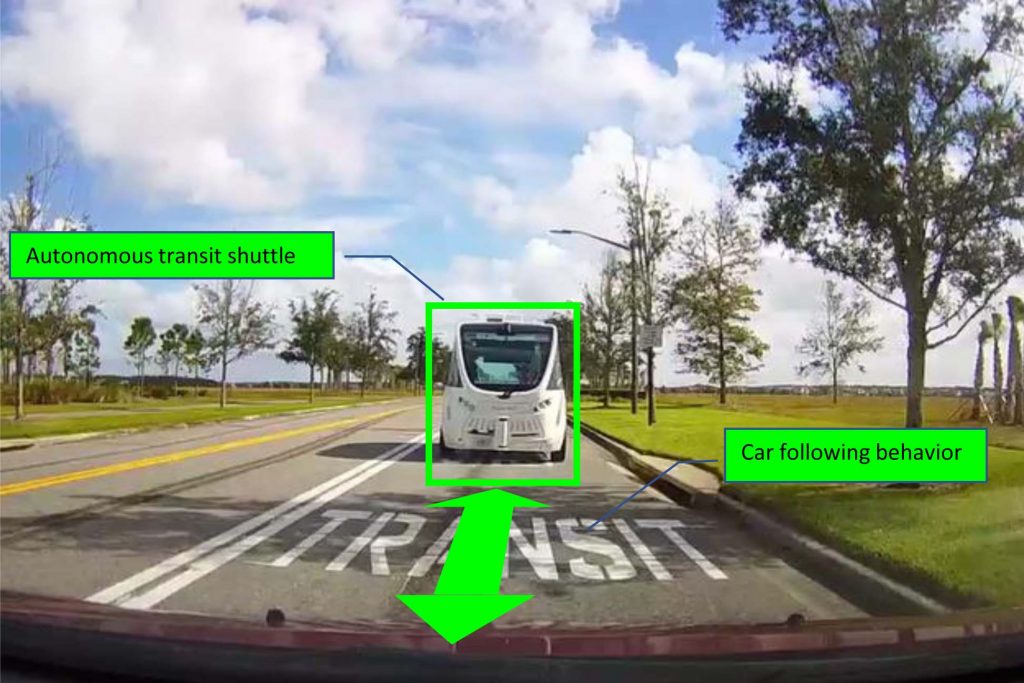
For his master’s thesis, civil engineering graduate student Shinya Maehara is developing car-following models in the presence of an Autonomous Transit Shuttle (ATS). He is looking at how the autonomous shuttle in Lake Nona, Florida behaves when sharing the road with human-driven vehicles.
Maehara’s thesis is titled Calibration of Car-Following Models under Traffic Flow with Autonomous Transit Shuttle (ATS). His thesis adviser is, Dr. Lily Elefteriadou, professor and director of the UFTI.
ATS are attracting the attention of traffic agencies because they are safe and efficient. These vehicles can serve as first and last mile transportation for transit agencies. Because they are self-driving, understanding what occurs when they share the road with regular vehicles is important.
“These types of autonomous vehicles drive and behave differently because of their autonomous nature, free from any type of human factors influencing their decision-making process with the surrounding traffic,” Maehara said. “That difference might affect the other vehicles through the interaction between them (the car-following behavior). Therefore, it is important to understand the driving behavior of ATS and how other vehicles interact with it.”
Maehara’s thesis objective is to calibrate the existing car-following models based on actual driving data available. The calibration work is expected to be one of the products resulting from his research.
“The calibrated models for ATS and other vehicles will be the research outcome,” Maehara said. “It can reproduce the driving behavior of ATS and other vehicles. Once the models are applied to micro traffic simulation, the network scale effect of ATS can be evaluated, enabling us to evaluate the network scale effects of ATS on traffic operations.”
The results of this research, including the calibration model for ATS, will help practitioners evaluate the impacts of these vehicles and support their decision-making process before implementation into communities around the country.